The modern wafer scanner is a truck-sized contraption full of magnets, springs, and slabs of granite capable of accelerating at several g's while maintaining single-digit nanometer positioning accuracy. The motion systems contained within painstakingly try to optimize for dynamic performance by using active vibration dampening, voice coils, linear motors, and air bearings, all to increase the value of the machine for its owner (who spent a good fraction of a billion dollars on it).
As it turns out, a 80's stepper is none of these things. Scanners are immensely complex because they are dynamic systems - as the wafer moves in one direction, the reticle moves in the other direction, perfectly synchronized but four times faster. In contrast, steppers are allowed time to settle between steps, which allows for much more leeway in the motion system design. Throughput requirements were also lower; compare the 35 6" wph of an old stepper to the 230 12" wph of a modern scanner.
Old stepper stages are an instructive exercise in the design of a basic precision motion system; in fact, Dr. Trumper used to give this exact stage out as a controls exercise in 2.171. The GCA stages are also particularly interesting from a hardware perspective - they are carefully designed to achieve 40nm positioning accuracy using fairly commodity parts. The only precision parts seem to be the slides for the coarse stage, and even those are ground, not scraped.
The stage architecture
 |
| System overview |
GCA steppers use a stacked stage architecture. Coarse positioning is done by two conventional mechanical bearing stages stacked on top of each other. Fine positioning is done by a single two-axis flexure stage. Rotational positioning, which only happens for alignment, is done using a simple open-loop, limited travel stage mounted on the fine stage. Focusing, which is done by changing the Z spacing between the lens and the wafer, is done by moving the optical column up and down with a linkage mechanism.
The position feedback system
The fine position feedback on GCA steppers is implemented through a two-axis HP 5501A heterodyne interferometer. Briefly, a stabilized HeNe laser is Zeeman split through a powerful magnet to create two adjacent lines separated by a few MHz with different polarizations. One of these lines is separated with a polarizing beam splitter and reflected off a moving mirror; this line is Doppler shifted due to the velocity of the moving mirror and beat against the stationary component to generate a signal. This signal is compared against a stationary REF signal to derive velocity and position measurements. Heterodyne interferometers are the preferred choice for metrology due to their insensitivity to ambient effects and power fluctuations.
The 5501A is the de facto choice for interferometric metrology; its successor the 5517 is still available from Keysight. A description of the system as found in the GCA steppers is as follows:
The laser points towards the rear of the stepper; a 10707A beam bender and a 10701A 50% beam splitter generate the two axes of excitation. The X and Y stages have identical measurement assemblies; the Y assembly is located to the rear of the stepper (behind the column) and the X assembly is located inside the laser housing. Both assemblies use a plane-mirror interferometer which differentially measures the wafer position against the optical column; the stationary mirror is a corner cube mounted to the column and the moving mirror is a 6" long dielectric quartz block mirror mounted to the wafer stage. The flats are precision shimmed to ensure orthogonality (since it is the orthogonality of the flats which determines the closed-loop orthogonality of the motion).
There are two additional position sensors in the system. The first is a sensor to measure the position of the fine stage relative to the coarse stage. Literature indicates that this is an LVDT, but on the 6100C it appears to be implemented as two photodiodes outputting a sin/cos type signal. The second is a brushed tachometer on each of the coarse stage drive motors, which is used for loop closure by the stock controller.
The coarse stage
The purpose of the coarse stage is to position the fine stage to within 0.001" of its final position. The stage is built as a pair of stacked plain-bearing stages; these stages are driven by brushed DC motors with brushed tachometers for velocity feedback. The motors go through a right-angle gearbox comprising of a bevel gear and several spur gear stages before being coupled by a flexible coupling to a long drive shaft which turns a pinion positioned near the center of each stage. This pinion drives a brass rack mounted to the stage which generates the final motions.
The fine stage
The fine stage is constructed as a parallel two-axis flexure stage with a few hundred microns of travel on each axis. The flexures are constructed from discrete parts; the stage is made from cast iron and the flexures themselves are constructed from blue spring steel. Actuation is by moving-coil voice coil motors with samarium-cobalt magnets, and position is read directly from the interferometer system.
The theta stage
The theta stage is a limited travel stage based on a tangent arm design. A (very small) Faulhaber Minimotor is coupled into a high reduction gearbox, which drives a worm gear that turns a segment of a worm wheel. The worm wheel pushes on a linkage which rotates the wafer stage about a pivot point.
Rotation control is entirely open-loop - the wafer is rotated once during the alignment process based on the fiducials observed through the alignment microscopes. A slow open-loop system is acceptable given that the speed of rotational alignment does not significantly affect wafer throughput.
The Z mechanism
The focusing mechanism is a limited-travel (according to literature, about 600um) flexure mechanism. The entire optical column is suspended on two large spring steel plates; a stiff spring counterbalances the weight of the column. A voice coil motor (identical to the fine stage VCMs) actuates a linkage mechanism which moves the column up and down.
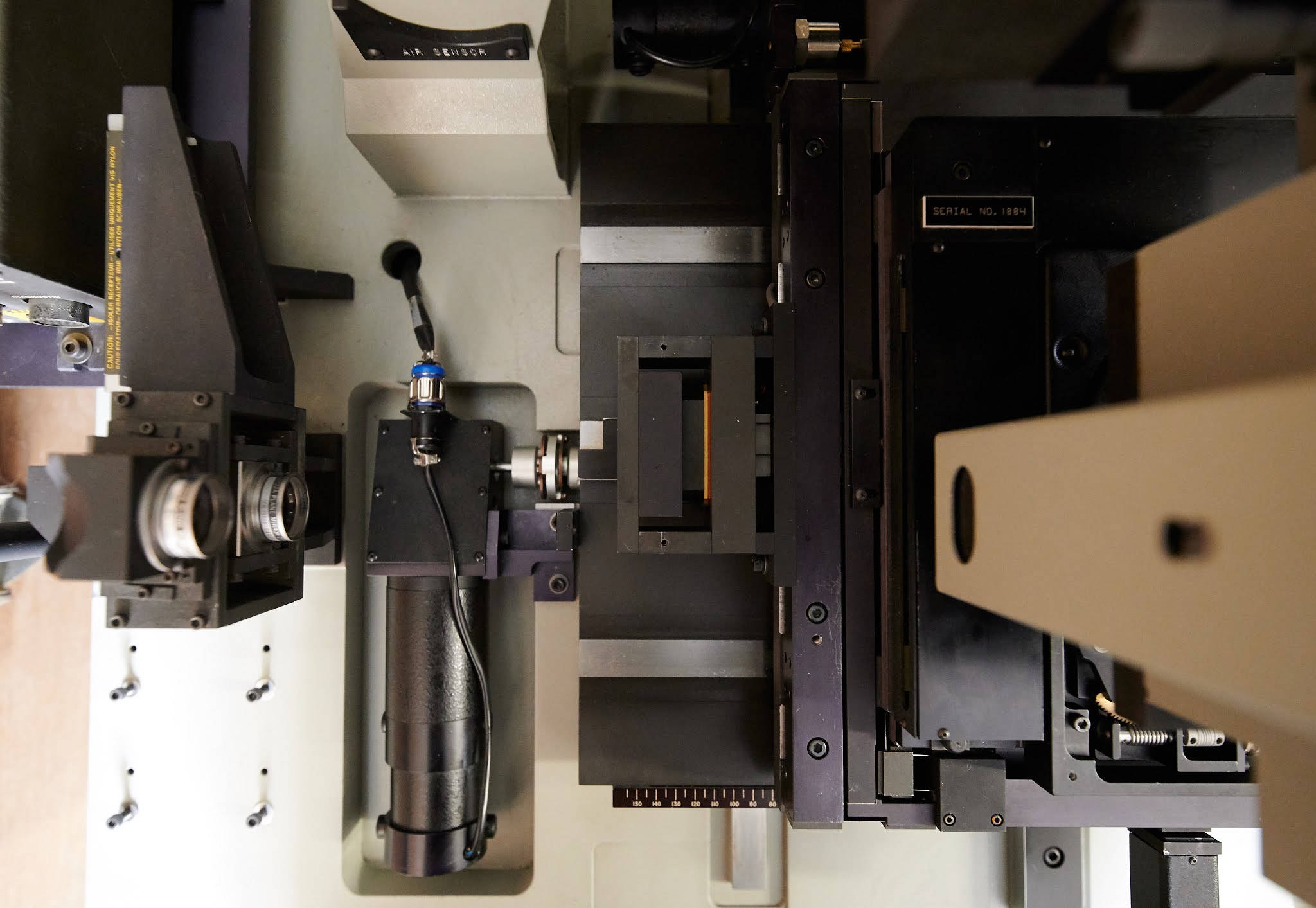
Adjusting the mechanism is a bit subtle. The white rod sticking out is actually a tensioning mechanism for the counterbalance; it is possible to aggressively tension the spring to stiffen the assembly for transport. The cap at the end of the rod can be removed to reveal a nut and a piece of threaded rod with a flathead in it. You want to hold the rod in place with a screwdriver and crank on the nut with a wrench until the column just barely 'floats' in place.
Incidentally, this mechanism also reveals a fairly severe weakness of the focusing system - it is extremely undamped. Any disturbances on the column cause the whole assembly to ring like a bell, with the only source of damping being the resistance of the VCM. I think (though there is some information to the contrary) that 6000-series GCA steppers focused once per wafer, relying on wafer leveling to keep the image in resist in focus between fields. Otherwise if the focusing had to be highly dynamic there could be problems.